PLUMABot
Pontificia Universidad Javeriana, 2022
Authors: Sergio Lavao, Maria Carreno
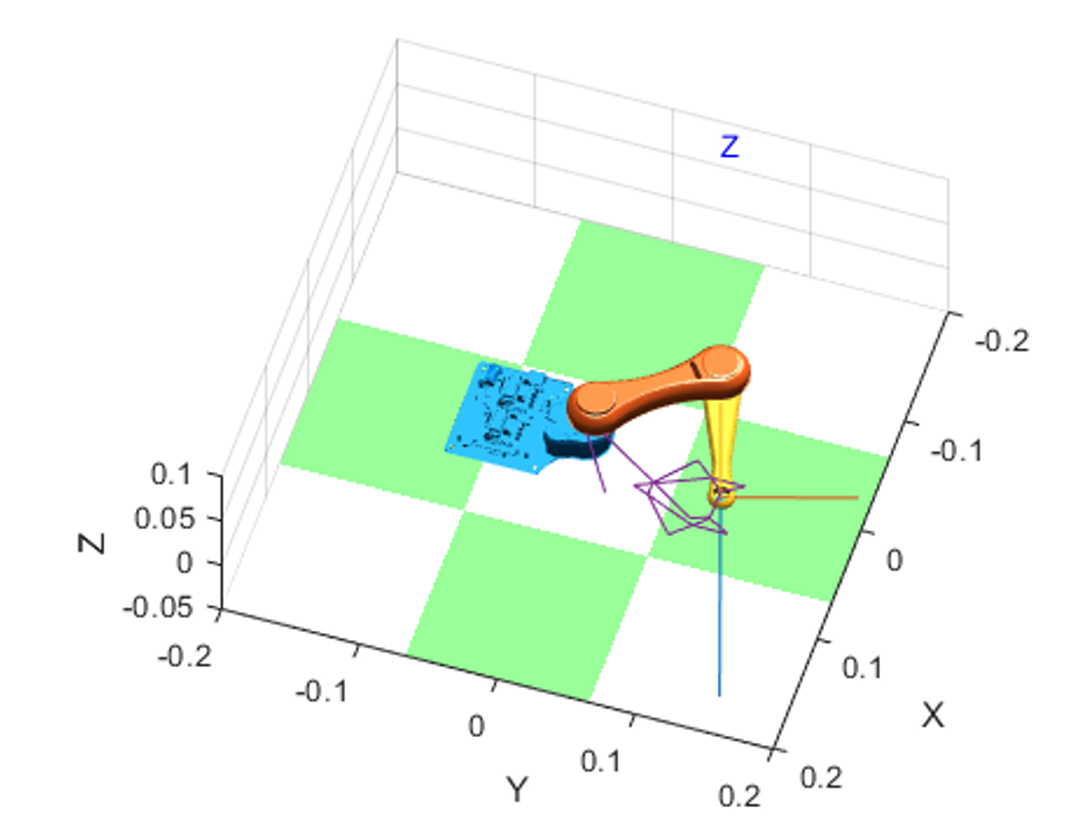
Design of a open-Source 2DoF planar low cost robot controlled using Python based on given Blender coordinate points. Automation of Path Planning and implementation of Inverse and Forward Dynamics and Kinematics using Matlab